

 |
Testeur ultrason SR04 et servo-moteur |
Janvier 2019 |
Pour détecter les obstacles un composant est régulièrement utilisé par les amateurs.
Le capteur à ultrason SR04 permet de mesurer la distance entre votre robot et les obstacles sur son chemin,
il est donc très utilisé en robotique amateur son prix étant très abordable. Techniquement son utilisation avec un microprocesseur
est très simple, il suffit d'envoyer une impulsion de 10 µs en entrée et il retourne une largeur d'impulsion proportionnelle à la distance.
Pour le problème des mouvements du robot le composant le plus utilisé est sans nul doute le servo moteur. Il permet simplement de réaliser des
mouvements à 180° précisément et sans complication technique. Il suffit avec un microprocesseur d'utiliser la PWM (commande par largeur d'impulsion).
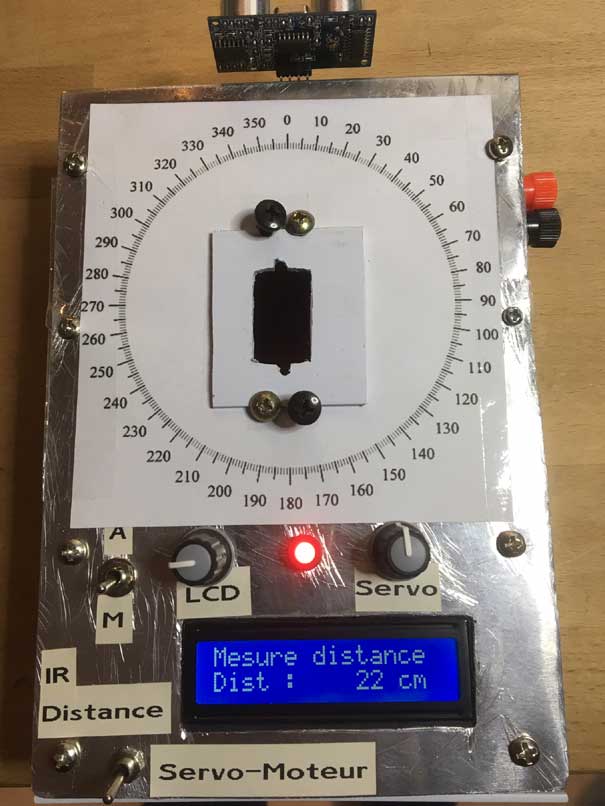
Bien que l'utilisation de ces deux technologies soit simple il est primordial de connaitre les valeurs précises nécessaires à l'utilisation envisagée
afin de réaliser un code de programmation fiable. J'ai donc développé le petit montage suivant qui m'indique sur un petit cadran LCD les valeurs
qui conviennent à mes montages. Si la réalisation de ce genre de montage vous intéresse je vais tenter de vous faire gagner un peu de temps...









// Castoo
// Module de tests
// Affichage délai en microsecondes des parametres d'un servo moteur en test
// Affichage distance d'un capteur SR04 en test
// Sur ecran LCD
#include "LiquidCrystal.h"
const boolean test_serie = LOW; // Pour test avec sortie sur interface serie HIGH (A passer à LOW avant compilation definitive)
const int bt_typ_mesur = 11; // Bouton choix type de mesure
const int servo_a_tester = 2; // Broche S du servo a tester sur broche 2
const int potar_servo = 0; // Potentiometre de 10K pour faire varier le delai entre deux tests d'impulsion
const int trigPin = 8; // Broche du triger du capteur sr04
const int echoPin = 7; // Broche echo du capteur sr04
const float v = 331.5+0.6*20; // Calcul de la vitesse en seconde du son en fonction d'une temperature de 20 degres
LiquidCrystal lcd(9,10,3,4,5,6); // LCD avec liaison 4 bits de données
int v_potar; // Valeur analogique de lecture du potar du servo
char message[16] = ""; // Variable affichage sur ecran LCD 16 caracteres
void setup(){
if (test_serie == HIGH) Serial.begin(115200); // Test
lcd.begin(16,2); // Initialisation de l'écran
pinMode(bt_typ_mesur, INPUT); // Bouton choix type de mesure
digitalWrite(bt_typ_mesur, HIGH); // mode pull-up sur bouton
pinMode(trigPin, OUTPUT); // Broche triger en sortie
pinMode(echoPin, INPUT); // Broche echo en entree
pinMode(servo_a_tester, OUTPUT);
}
// Mesure de la distance et convertion en cm
float distanceM(){
// Genere une impulsion de 10 microsecondes sur la broche triger
digitalWrite(trigPin, LOW);
delayMicroseconds(3);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
float tUs = pulseIn(echoPin, HIGH); // Lecture du temps alle/retour de l'onde en microsecondes
float t = tUs / 1000.0 / 1000.0 / 2; // Conversion en secondes et div par deux (seulement le retour de l'onde)
float d = t*v; // calcul de la vitesse en m/s
return d*100; // convertion en cm pour affichage
}
// Test le servo en generant un etat haut pendant le temps passé en parametre
void test_Servo(int servo_a_tester, int test_delai_servo) // <1>
{
digitalWrite(servo_a_tester, HIGH); // <2>
delayMicroseconds(test_delai_servo); // <3>
digitalWrite(servo_a_tester, LOW); // <4>
}
void loop(){
// Affichage distance sur LCD
lcd.clear();
lcd.home(); // Replace le curseur en haut a gauche
if(digitalRead(bt_typ_mesur) == HIGH){
// Mesure de distance
lcd.print("Mesure distance");
// Appel fonction de lecture de la distance
int d=distanceM();
// Affichage distance sur console serie
if (test_serie == HIGH) Serial.println(d, DEC); // Test
if(d > 286 or d < 1){
//si la distance est > a 2m86, l'onde est perdue
lcd.setCursor(0,1);
lcd.print(" Echec mesure");
}else{
sprintf(message, "Dist : %5d cm", d);
lcd.print(message);
}
delay(200); // ms
}else{
// mesure de servo moteur
for (int i=300; i<=3000; i = i + 2) {
test_Servo(servo_a_tester, i);
v_potar = analogRead(potar_servo); // Lecture du potar du servo
v_potar = map(v_potar, 0, 1023, 0, 150); // Convertion lecture du potar servo vers valeur entre 0 et 150
if (test_serie == HIGH) Serial.println(v_potar); // Test
delay(v_potar); // permet la lecture des valeurs sinon ca va trop vite
if (test_serie == HIGH) Serial.println(i); // Test
sprintf(message, "MicroSec: %5d", i);
lcd.clear();
lcd.home();
lcd.print("Mesure Servo");
lcd.setCursor(0,1);
lcd.print(message);
if(digitalRead(bt_typ_mesur) == HIGH) i=3001; // Si bouton choix mesure changé on sort boucle for
}
}
}